|
|
|
|
|
iSprawl (Independent Sprawl robot)
iSprawl is the
youngest and fastest sibling of Autonomous version of
Sprawl
robot family. I joined BDML at the end of this
Office of Naval Research project and designed iSprawl
for the first creation at Stanford. Whereas other sprawl robots utilize pneumatic system, iSprawl is equipped with battery and electric motor and power transmission system that convert rotary motion to reciprocal leg thrust. What most makes iSprawl unique is push-pull cable transmission system. Since Sprawl family turn its orientation by rotation of their leg with respect to hip joint, power transmission path is not fixed. Which is frequent problem in legged robot with centered engine.
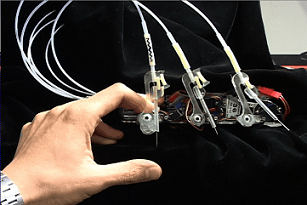
Critical
function prototype
of push-pull
cable system.
I tested push-pull cable system with styrofoam body without legs. This prototype runs surprisingly well. Click to see serial spring in the path of cable. see BDML iSprawl twiki page to learn more about iSprawl.
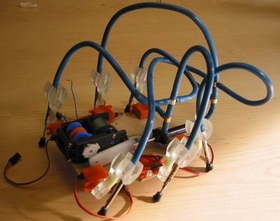
Aqua Sprawl (April 2003)
After
many design iterations, including remachining
the original Sprawlita pistons to put in double
seals to handle negative pressure on the return
stroke, a version of Aqua Sprawl was produced
that ran fairly well: Although Aqua Sprawl ran reasonably well, there is a fundamental limitation to the achievable speed because while retracting the pistons, only atmospheric pressure is available. On the other hand, this could be a good design for underwater use!
|



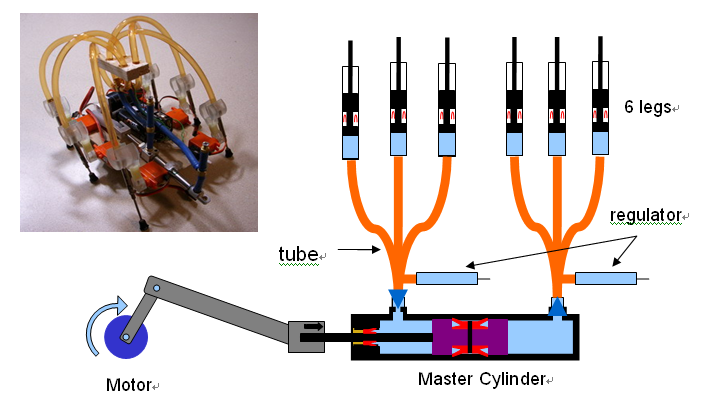
 Predecessor
of iSprawl, the first sprawl robot that operates
with autonomous power. It uses hydraulic power
transmission system. The idea was to explore
hydaulic power transmission to distribute power
to the legs. The tubes contain water and the
system works like hydraulic brakes on a car,
with a single master piston and slave pistons at
each leg. Aqua Sprawl is assembled in a bathtub
to prevent air bubbles.
Predecessor
of iSprawl, the first sprawl robot that operates
with autonomous power. It uses hydraulic power
transmission system. The idea was to explore
hydaulic power transmission to distribute power
to the legs. The tubes contain water and the
system works like hydraulic brakes on a car,
with a single master piston and slave pistons at
each leg. Aqua Sprawl is assembled in a bathtub
to prevent air bubbles.